











Marine research in the Kolumbo area near Santorini poses significant challenges due to its intricate hydrothermal field. To address this, a new research initiative is underway to develop intelligent autonomous vehicles capable of functioning in these demanding environments for prolonged periods with minimal human oversight.
The MERLIN project is set to revolutionize marine exploration and conservation. Launched in November 2024 and led by the University of Birmingham, this ambitious four-year initiative involves 18 partners across Europe and is fully funded by the European Union through the Horizon Europe program, boasting a total budget of €8 million.
The technologies being developed in this program are expected to serve purposes beyond scientific research, including infrastructure inspection, environmental monitoring, and promoting sustainable practices within the maritime industry.
Central to the program is the creation of technologies that allow autonomous marine vehicles to operate independently over extended periods, gathering essential marine data and executing complex tasks across diverse conditions.
Professor Mallorquin Papailias from the University of Birmingham’s School of Metallurgy and Materials, who oversees the MERLIN project, emphasizes the significance of autonomous marine robotics in enhancing our understanding of marine ecosystems. He stated to the Athens News Agency, “These technologies are not merely research tools—they are crucial for protecting marine habitats and furthering the sustainability of the Blue Economy.”
Typically, commercially available Autonomous Underwater Vehicles (AUVs) and Remotely Operated Vehicles (ROVs) rely on costly, crewed support vessels. Their ability to manipulate objects with robotic arms significantly depends on the operator’s expertise. Deep-sea research missions and offshore inspections are often complex and costly, making them accessible to only a handful of organizations worldwide.
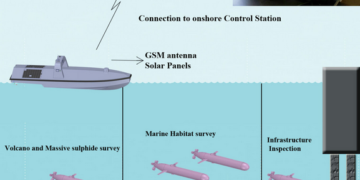
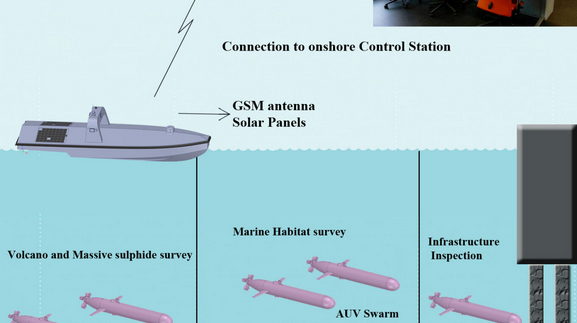
MERLIN proposes a groundbreaking approach by utilizing intelligent autonomous AUVs launched and retrieved by an Uncrewed Surface Vessel (USV). These vehicles will perform seabed mapping, habitat monitoring, infrastructure inspections, and sample collection. Each robotic unit will be equipped with advanced sampling capabilities, allowing them to manage various underwater and surface tasks. Modular sensor payloads will be customized for specific missions, while AI tools will enhance autonomous navigation to adapt to changing environments. A Mission Remote Control Center (MRCC) will facilitate interactions between human operators and the USV and AUVs via wireless or satellite communication, with underwater commands sent using an acoustic modem from the USV.
Professor Papailias noted that autonomous systems technology has advanced significantly over the past ten years. However, commercially available (non-military) systems are generally limited in range and depend on remote control or pre-programmed missions with restricted adaptability.
“Through the earlier ENDURUNS project and now MERLIN, we are developing new surface robotic systems capable of deploying underwater vehicles directly into mission areas and providing them with underwater positioning data, thus removing the need to surface,” he highlighted.
The vehicles offer several advantages. “Not only are they powered electrically, but they also combine hydrogen fuel cells with hydrogen storage for recharging lithium batteries, and surface vehicles are equipped with solar panels. In MERLIN, we are enhancing AI functionalities to allow vehicles to make real-time decisions for optimizing their missions based on selected parameters. They will also feature robotic arms for sampling and inspecting coastal infrastructure. Their autonomy will considerably lower mission deployment costs and facilitate continuous monitoring of targeted areas,” he added.
Field trials in Barcelona, Santorini, and Lithuania
The innovative vehicles developed through MERLIN will be subjected to real-world testing in three distinct missions, each presenting unique challenges.
The first mission will take place at the OBSEA marine observatory off Barcelona’s coast, providing controlled open-sea conditions to evaluate monitoring systems and vehicle sensors.
The subsequent mission will tackle the challenging environment of the underwater Kolumbo volcano crater, situated northeast of Santorini. Under the leadership of the Hellenic Centre for Marine Research (HCMR), with contributions from Dr. Paraskevi Polymenakou and Professor Evi Nomikou from the National and Kapodistrian University of Athens—head of the “SANTORY” underwater observatory—this mission will rigorously test the vehicles’ capacity to operate under extreme conditions and gather data from a unique underwater volcanic ecosystem.
As Professor Nomikou communicated to the Athens News Agency, “In Kolumbo’s crater, close to the active hydrothermal field, we encounter severe environmental conditions, including low pH, elevated temperatures, and high CO₂ emissions. Employing an autonomous underwater vehicle pre-programmed with AI before diving into the crater allows us to obtain samples without utilizing costly oceanographic vessels. This marks the first instance of a fully autonomous vehicle collecting a sample in Kolumbo, following simulations of the hydrothermal field using data from SANTORY. Such vehicles are essential for swiftly gathering oceanographic data during seismic events, like the one in February 2025.”
The third mission will concentrate on inspecting port infrastructure at the Klaipeda port in Lithuania, in the Baltic Sea. This mission will demonstrate the practical commercial potential of these autonomous vehicles in industrial applications.
Ask me anything
Explore related questions



{kind=link}